Predictive Control for Embedded Systems:
State of the Art and Future Challenges
1-day post-conference workshop
at the 51st IEEE Conference on Decision and Control
Maui, Hawaii
Friday December 14th 2012
Organizers:
- Rolf Findeisen (Otto von Guericke Universität Magdeburg, Germany)
- Colin Jones (EPFL Lausanne, Switzerland)
Contributors:
- M. Diehl/Sebastien Gros (KU Leuven, Belgium)
- E. Kerrigan (Imperial College, UK)
- M. Mönnigmann (Bochum University, Germany)
- G. Papafotiou (ABB, Switzerland)
Content and objective:
In recent years there has been a strong interest in opening up new application fields for predictive control, with a main focus on systems requiring fast sampling rates, but that are implemented on computationally limited, or low cost embedded hardware platforms. For these applications, efficient, real-time and accurate solutions of the underlying optimization problem are required, in order to guarantee stability, performance, and satisfaction of constraints. Providing solutions to these challenges requires the close intertwining of methods from control and systems theory, computer science as well as numerical analysis.
The purpose of this workshop is to provide an introduction and overview of the current state of the art of predictive control for embedded systems, as well as an outlook toward current and future challenges. After a basic introduction into the field of predictive control on embedded systems, internationally well-recognized researchers in the field will outline the major advances over the last years with a special focus on the interplay between
- efficient real-time feasible synthesis and solution strategies
- important system theoretic results with respect to stability androbustness
- key implementation aspects, such as numerical precision versus quantization,and automatic code generation
The results presented cover explicit solution strategies for MPC, efficient iterative solution methods for MPC, implementation aspects of MPC on embedded systems and special hardware platforms such as FPGAs as well as subject to numerical truncations, stability and performance, as well as efficient automatic code generation for MPC.
The theoretical results will be complemented by several simulation and real world application studies, as well as a contribution from the industrial partner ABB, underlying the real world challenges, achievable benefits and the current existing limitations of predictive control on embedded systems.
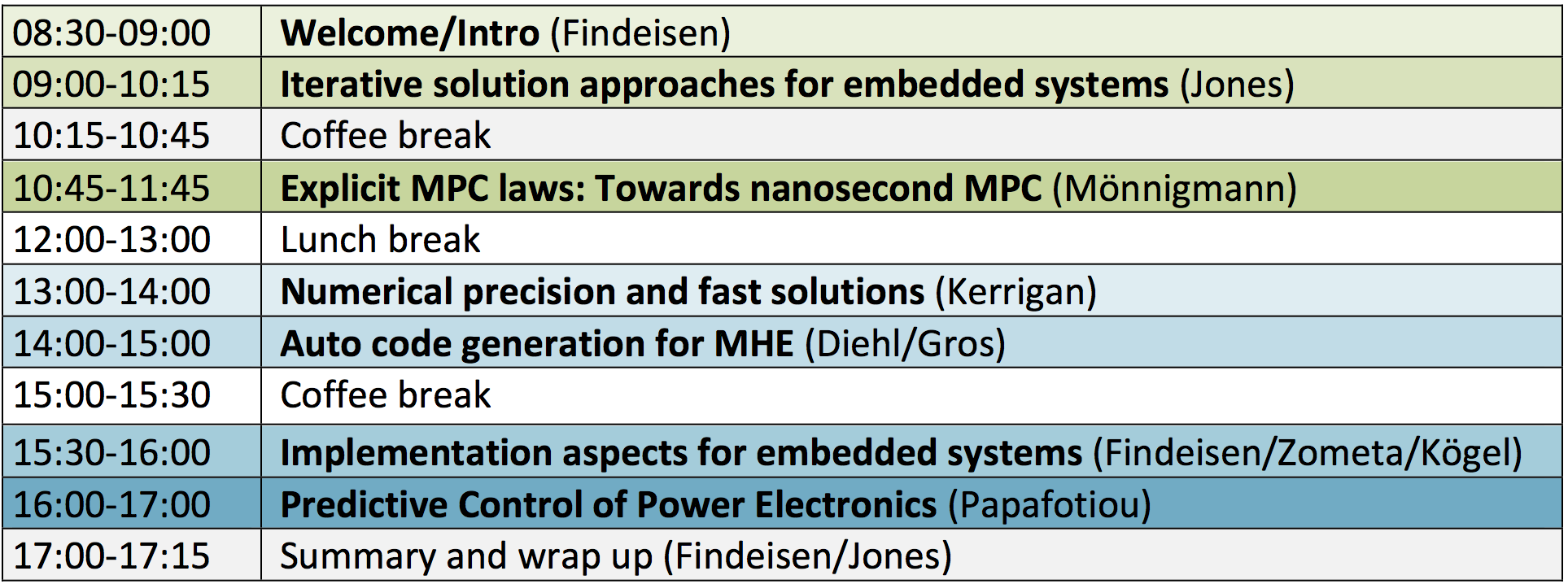
Tentative Program
The workshop is organized as a one-day workshop. Six contributors from different fields will present the current state of the art and future challenges in the area of predictive control for embedded systems. The course is roughly split up in three parts: an introductory segment, including background information; a section focusing on the interplay between efficiency, implementation properties, numerical methods, and system theoretic properties; and will end with an application study.
Slides
You can download the slides here (file-size 50MB).Contact
If you have any questions feel free to contact Rolf Findeisen or Colin Jones.