Implementation of an optimal control law for an inverted pendulum using Al'brekht's Method
How to stabelize the upper and lower steady state of an inverted pendulum is already well known and understood. Via linearization of the dynamics one can even use a linear control law. Nevertheless advanced control schemes can be used. One of these schemes uses Al'brekht's Method in which an approximation of an optimal control input is calculated. The basic idea is to solve the Hamilton-Jacobi-Bellman partial differential equations via a power series expansion of the RHS, cost function, optimal cost function and the control input. The degree of the approximation can be chosen by the user. Degree one would be equal to a Linear Quadratic Regulator.
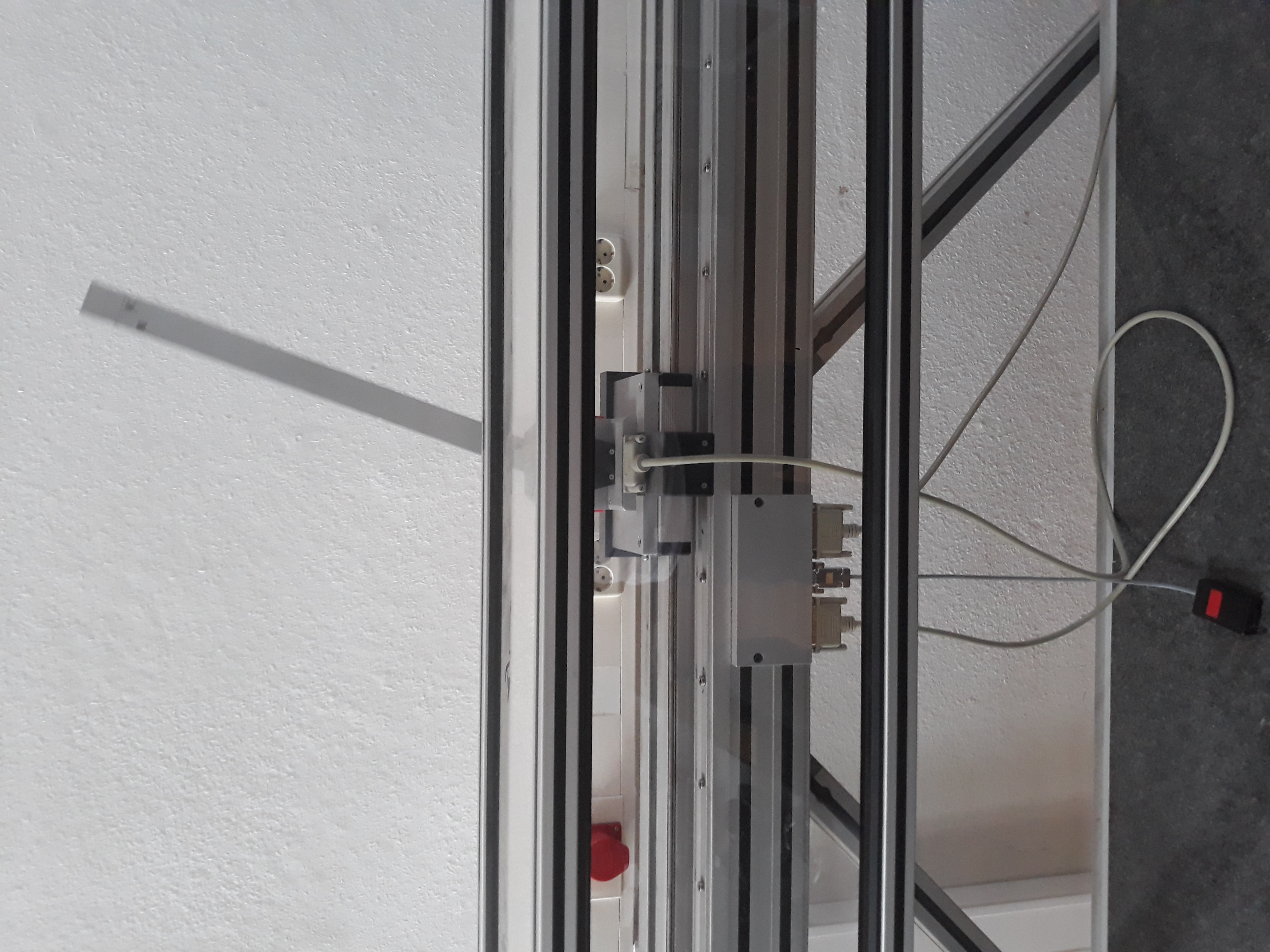
The task is to apply Al'brekht's Method, calculate a control law, implement it in Matlab/Simulink and validate the results with the pendulum in the laboratory.
Topic Area:
Helpful/Required Prerequisites:
Experience with: Matlab and Simulink
Language: German or English
Others: Good mathematical knowledge
Project Start:
Estimated time requirements:
Implementation: 50%
Validation: 10%
Contact:
Petar Andonov