Systems and Control Seminar in the Winter Semester 2018/2019
Disturbance Observer Based Control and MPC
Speaker
Professor Wen-Hua Chen
Department of Aeronautical and Automotive Engineering,
Loughborough University, UK
Time and Place
Abstract
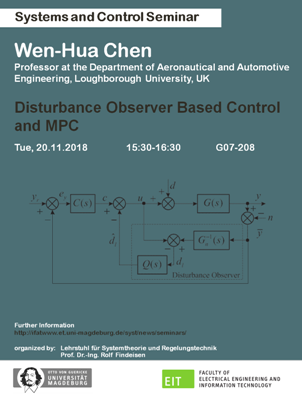
Disturbance Observer Based Control (DOBC) and related methods have been researched and applied in various industrial sectors in the last four decades. This talk gives an overview of a number of widely used linear and nonlinear disturbance/uncertainty estimation techniques, and then discusses and compares various compensation techniques and the procedures of integrating disturbance/uncertainty compensation with a (pre-designed) linear/nonlinear controller. It provides in-depth analysis of the relationships between these methods and, more importantly, on their similarities and differences with a number of well-known control methods. It shows that DOBC and MPC (Model Predictive Control) are naturally complimentary with each other as MPC is able to fully exploit the model information while DOBC copes with unmodelled dynamics and external disturbances.
Information about the Speaker
Wen-Hua Chen holds Professor in autonomous vehicles in the Department of Aeronautical and Automotive Engineering at Loughborough University, where he is also heading the Controls and Reliability Research Group. Before joining Loughborough in 2000 as Lecturer in Flight Control, Dr. Chen was a Research Fellow and then a Lecturer in Control Engineering in the Centre for Systems and Control at the University of Glasgow, Scotland. Dr Chen has a considerable experience in advanced control and signal processing and their applications in aerospace and automotive engineering. In the last 12 years, he has been spending most of his effort in developing autonomous system technologies and their applications in agriculture, environment and defence. Prof Chen is a Chartered Engineer, and a Fellow of IEEE, the Institute of Engineering and Technology and the Institute of Mechanical Engineers, UK. He has published about 250 papers with about a total of 9,000 citations.