Stabilizing NMPC for Networked Control Systems
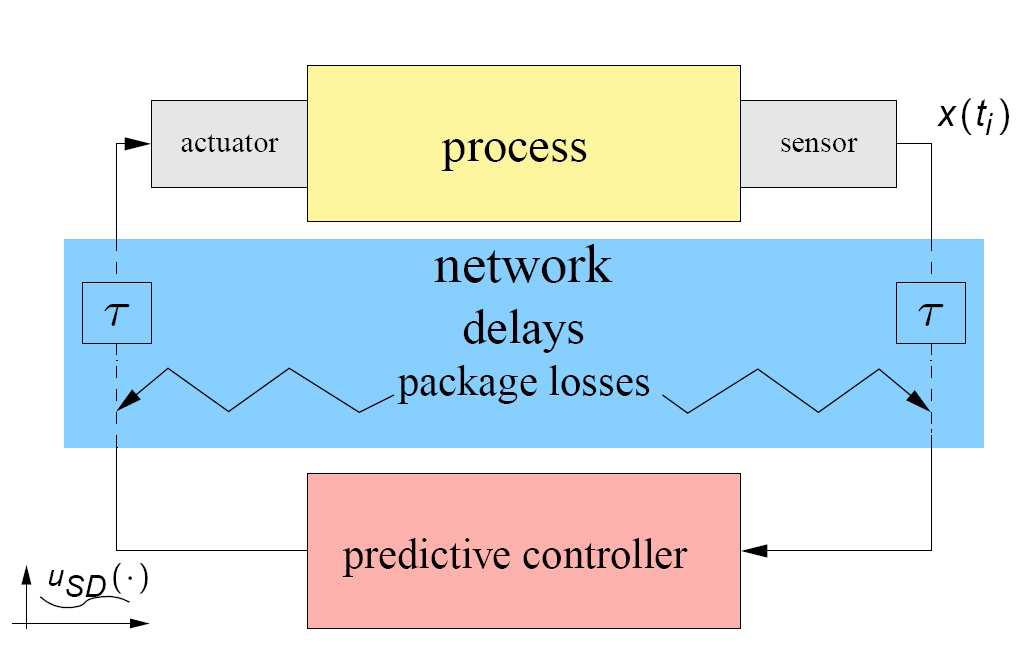
The diffusion of communication networks has given birth to a new idea of control systems in which controllers, and systems are distributed. This gives a lot of advantages but it also introduces many new challenges, such as packet losses and delays, which can cause instability of the controlled systems. While a lot of work has already been done for linear systems, only a few results are available for nonlinear ones.
The main idea is to use a predictive approach to compensate the dead-time introduced by the communication channel. The student is required to analyze the problem, and realize simulations in Matlab, in which a benchmark system, e.g. inverted pendulum, is used to show that the method is effective.
Topic Areas:
Systems Theory, Predictive Control, Nonlinear Control, Networked Control Systems
Suggested Pre-Knowledge:
Regelungstechnik, Optimal Control, Matlab
Time requirements:
| Literature Research and Modelling |
40% |
| Systems Theory |
20% |
| Simulation/MATLAB |
40% |
References:
- An Introduction to Nonlinear Model Predictive Control
- Special Issue on Technology of Networked Control Systems
- A Survey of Recent Results in Networked Control Systems
(The former articles are available as Pdf. Send an email to
Paolo Varutti for more information.)
Supervisor:
Paolo Varutti